

- By YIKONG
- 2025-03-10 14:32:09
- テクニカルサポート
AGV現場データ分析 - ステアリングホイールの監視とメンテナンス
1. デバッグの背景と製品情報:
デバッグサイト:ターミナルサイトの自動車組立工場の生産ライン。
試験機:AGV車両1号機、2号機、8号機
ステアリングホイールモーターパラメータ:MRT20.0142 定格電力 1000W、定格電圧 48VDC、定格電流 26A、ピーク電流 70A、定格速度 1700RPM、最大動作温度 110 度。
ドライバパラメータ:最大電圧 60VDC、定格電流 60A。ピーク電流120A;最大動作温度85度;
AGV1号機の牽引モーターから煙が出始めました。
2. AGV1号機、2号機、8号機の監視データの概要:
3. 通常運転監視データの予備分析:
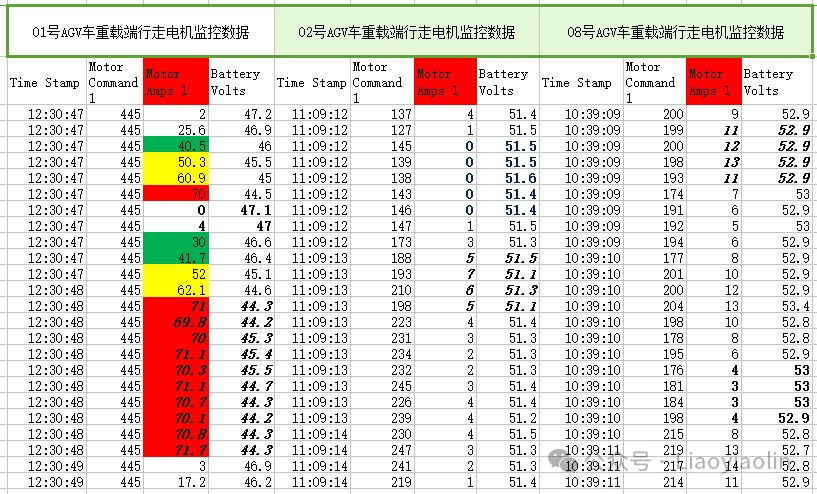
監視データテーブルの概要から、通常の直線移動中、モーター電流は数アンペアから十数アンペアの間で変動していることがわかりました。これは、このときのモーターの実際の負荷率が 50% 未満であることを意味し、モーターとドライバーの選択が直線動作の要件を満たしていることを示しています。
監視データテーブルの概要から、車体が横方向に動くと最大電流ピークが 70A に達する可能性があり (このパラメータは運転者が設定)、正常な持続時間は 2 秒未満であることがわかりました。これは、モーターとドライバーの選択が横方向の移動の要件を満たしていることを示します。
データ要約表から、通常の動作中にバッテリー電圧がモーター電流に与える影響が重要であることは容易にわかります。バッテリー電圧が48Vより低い場合、モーターは横移動の瞬間に負荷を引きずるのに十分な大きなトルクを出力し、出力電流が急激に増加します。低電圧のこのような過酷な動作条件下でも、モーターの過負荷は最小限に抑えられており、モーターとドライブが横方向の動きの条件下で最大出力に対応するのに十分であることがわかります。
通常動作中の 3 つのモーターのデータを監視するという前提では、通常の状況下ではモーターが過熱することはありません。この点については、後続のデバッグおよび製造プロセス中に温度赤外線銃を使用して検査することができます。 AGV車両が20分以上(モーターの熱バランス時間程度)連続走行すると、赤外線ガンで測定した最高温度データに5~10度(モーター巻線から筐体への熱伝達温度差程度)を加えた値が、モーター巻線の実際の温度に近くなります。 110度未満であれば、長時間安定して動作できます。 AGV1号機のモーターは2度煙を出したが、その後のテスト走行では異常は発生せず、モーターの性能は依然として信頼できることがわかった。
4.工場内のモーター1台の異常とAGV1号機運行中の過熱(発煙)の解析:
現状では、工場異常のモーターの関連データを検査することは不可能であり、分析・判断の前提条件を満たしていないため、ここでは省略します。運転中に過熱するモーターは次のように分析され、次のような可能性が考えられます。
1. モーターが停止しています。原因としては、ブレーキの解除が不完全でモーターに過負荷がかかっていることなどが考えられます。
2. 2 つのモーターの速度が同期していないため、「正面衝突」または「綱引き」の傾向が発生し、モーターに過負荷がかかります。
3. 地面の障害物により車輪が動かなくなり、モーターが停止しました。一定時間の緊急停止の後、AGV 車両は自動で移動し、異常な状況を解消しました。
4. 2 つの駆動輪の走行傾向が同じ直線、平行線、または同心円弧の軌道上にないため、2 つのモーターの結合力が低下し、過負荷が発生します。 AGVは1メートル以上直線走行した後に煙を出したので、この異常事態も除外されます。
5. バッテリーの出力電力が不足し、モーター電流が増加してモーターが過熱する原因となります。この現象はその後のテストでバッテリーのエネルギー貯蔵の重大な不足であることが確認されました。その後のテストでも、AGV 1号機のバッテリーエネルギー貯蔵が不十分であることが判明しました。
6. ドライバパラメータの設定が不適切であったり、障害が発生すると、モータ電流が制御不能となり、適切なタイミングで保護されずに過剰なモータ電流が発生します。注意: この状況は、ドライブがモーターよりもはるかに大きい場合に発生する可能性が高くなります。
7. モーターに内蔵された温度保護機能が欠落しているか、使用されていません。
8. 上記の分析に基づいて、モーターの過負荷を引き起こす原因として確認されたのは、モーターの温度保護機能が使用されていないことです。ドライバの低電圧および電流制限保護機能は使用されません。バッテリーのエネルギー貯蔵が著しく不足しています。 AGV1号機のモーターから煙が出る主な原因は、上記3つの要因が同時に発生したためと考えられます。 3 つの要因のいずれか 1 つを排除すると、モーターが過負荷になって煙が出ることはなくなります。
5. 治療方法または提案:

1. ドライバの低電圧は44〜45Vに設定されます。バッテリーのエネルギー貯蔵が不十分な場合、モーターの速度が低下し、出力電流が減少します(この保護機構はドライバーによって固定されており、リセットできません)。つまり、バッテリー電圧が不足すると、ドライバー、モーター、バッテリーパックを保護するために、AGV は停止するまでゆっくりと走行します。
注意:モーターから煙が出始める前に、一部の AGV 車両ではこの保護機能が設定されていません。後続のデバッグおよび操作中に適切な設定を行うことをお勧めします。
2. ドライバの電流制限保護範囲を適切に設定する必要があります。現在の設定は、70A ピーク電流制限、44A 電流制限保護、および 5000ms 遅延保護です。出力電流が 44A を超えて 5000ms 継続すると、ドライバは操作コマンドが再度受信されるまで出力をシャットダウンします。
注意 1: モーターから煙が出始める前に、一部の AGV 車両ではこの保護機能が設定されていません。後続のデバッグおよび操作中に適切な設定を行うことをお勧めします。
注 2: ピーク電流、電流制限保護、遅延時間などのパラメータは、その後の実際の作業で調整および最適化できます。
3.モーター温度保護機能は使用されません。モーターが煙を出す前は、モーター過熱信号は使用されません。モーターを過熱から効果的に保護するには、この機能を使用することをお勧めします。
4. 第4点分析の1については、当時の状況を再現・復元することはできない。機械が振動した後は接触不良や緩みがないか再度確認することをお勧めします。 2については、当時の状況を再現・復元することができません。上位コンピュータ システムを通じて 2 つのモーターの速度の一貫性を監視し、直線速度の差が大きすぎる場合は適時に介入することをお勧めします。 4.で述べた駆動輪走行軌跡問題については、その後のデバッグにおいて駆動輪走行軌跡や傾向一貫性の問題を最適化する必要がある。ポイント 5 については、AGV 車両の正常かつ継続的な動作を確保するために、バッテリーのエネルギー貯蔵量が減少したときに、適時に充電して電力を補充することをお勧めします。